
A collection of inquiries in
Architecture & Fabrication
to understand the world
as an assembly of:
Actions
Actors
Elements
About
Contact
Cybernetics
Force Feedback Polishing
Kansas City, MO
Zahner Labs, Research & Development Internship
Research Supervisor: James Coleman
When can automation augment skilled labor rather than take jobs?
Certain specialties within the metalworking industry are so harsh and unsuitable to human labor standards that even unions are looking to automated alternatives. The promise of robotic fabrication in these instances is that by relieving the burden on humans, a facility can maintain jobs by winning and fulfilling bids that would have otherwise been lost.

Force-Feedback Robotic Polishing Setup
 Prototype: Robotically Polished Mirror Finish
Prototype: Robotically Polished Mirror Finish
Robotic Mirror Polishing Process
Polishing is one of the most notorious operations in the metalworking industry.
Achieving a mirror finish is especially time intensive. For the workers, this job leads to long-term respiratory issues and nerve damage.
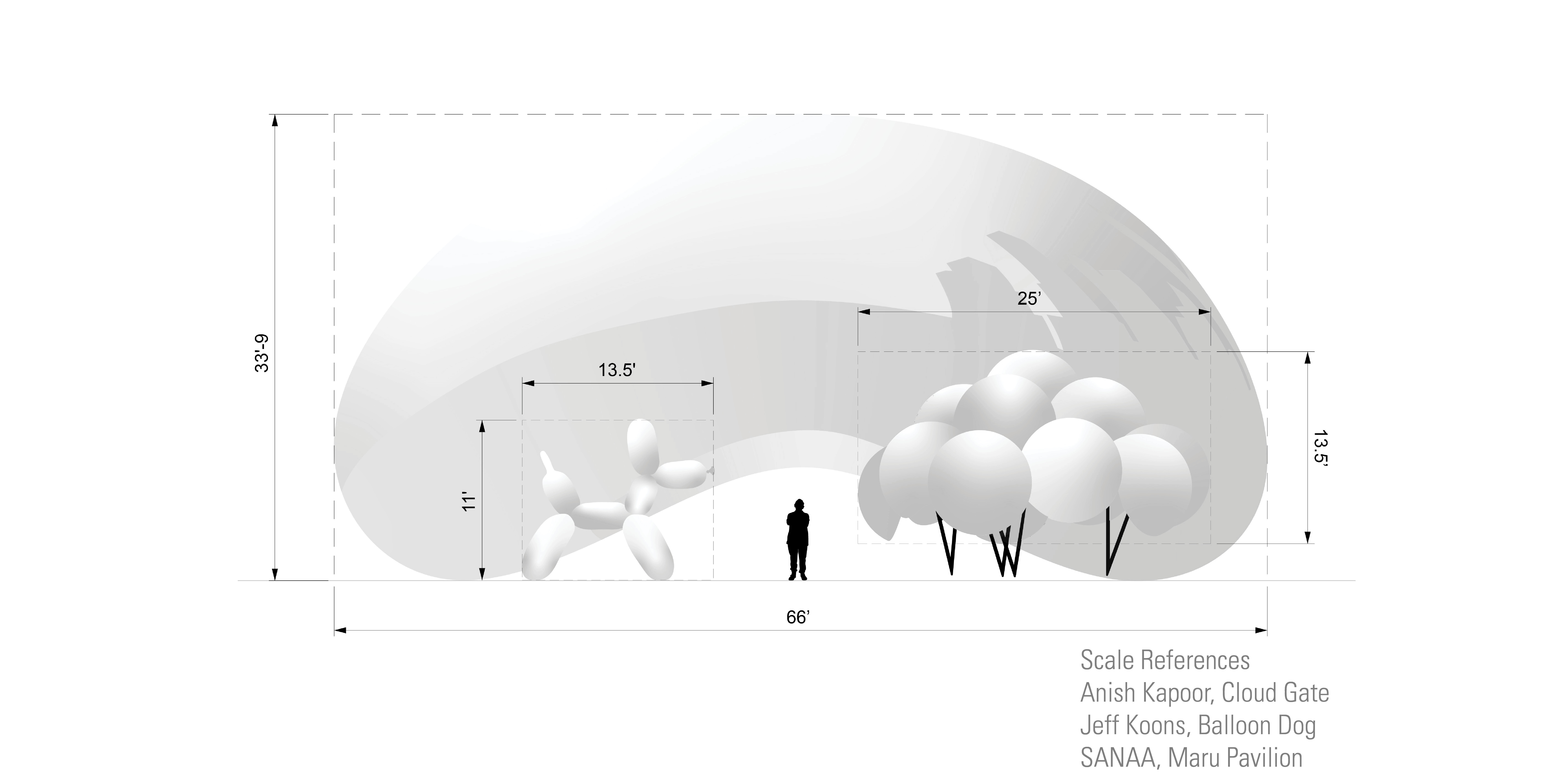
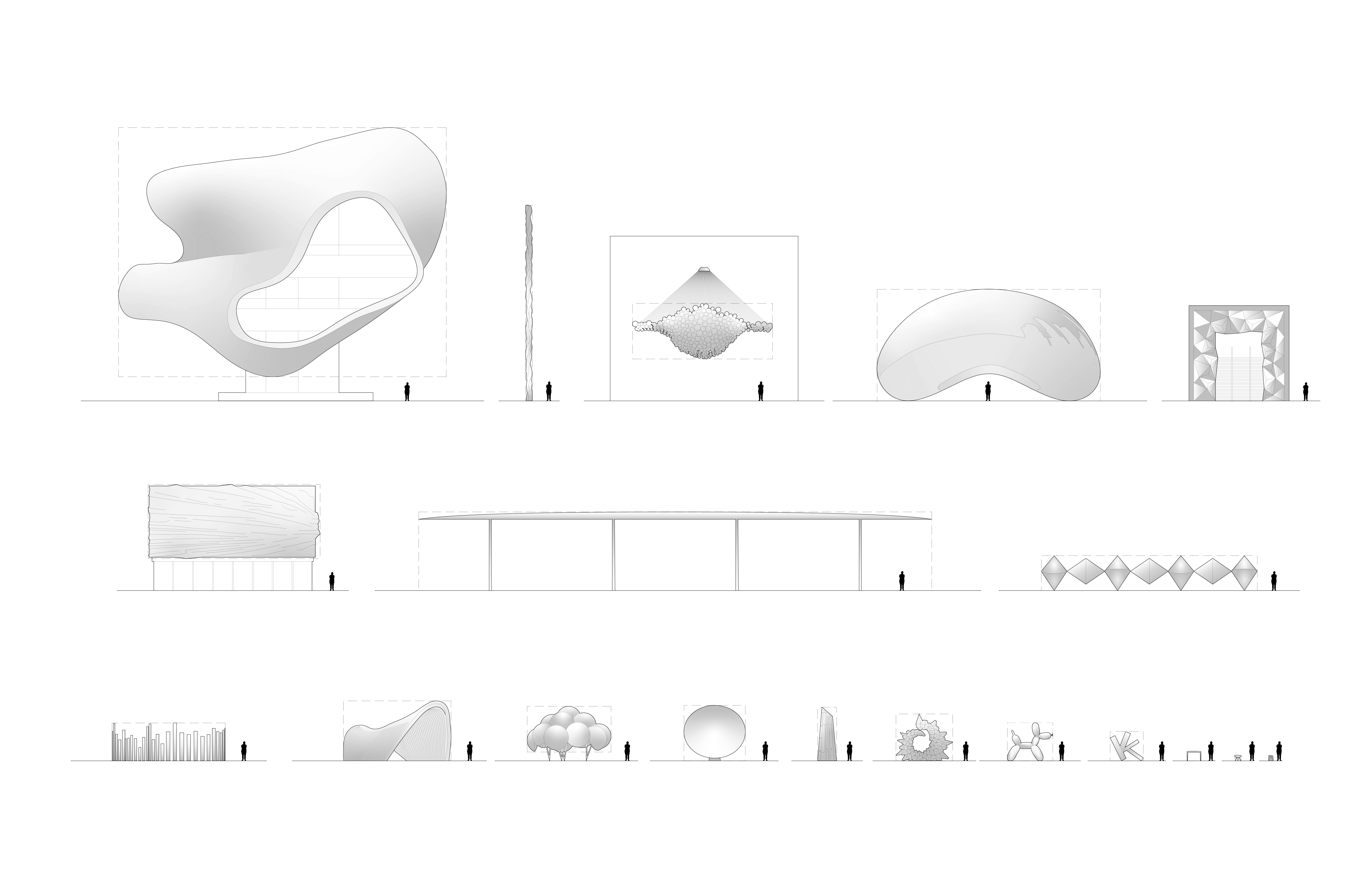
Projects like Cloud Gate have popularized the mirror finish, increasing demand for such labor. As bidding for these projects becomes more competitive, fabricators are increasingly likely to take shortcuts at the expense of worker longevity and health.

 Prototype: Buffing Wheel Drawing on Curved Surface
Precise patterning presents further opportunity for surface expression. In this prototype, the buffing wheel is used to cut into the mirror surface, embracing the artifacts of the polishing process.
Prototype: Buffing Wheel Drawing on Curved Surface
Precise patterning presents further opportunity for surface expression. In this prototype, the buffing wheel is used to cut into the mirror surface, embracing the artifacts of the polishing process.

Force Feedback Systems Integration
End Effector Assemblies for Pneumatic Finishing
 Detail: Robotically Cut Mirror Surface
Detail: Robotically Cut Mirror Surface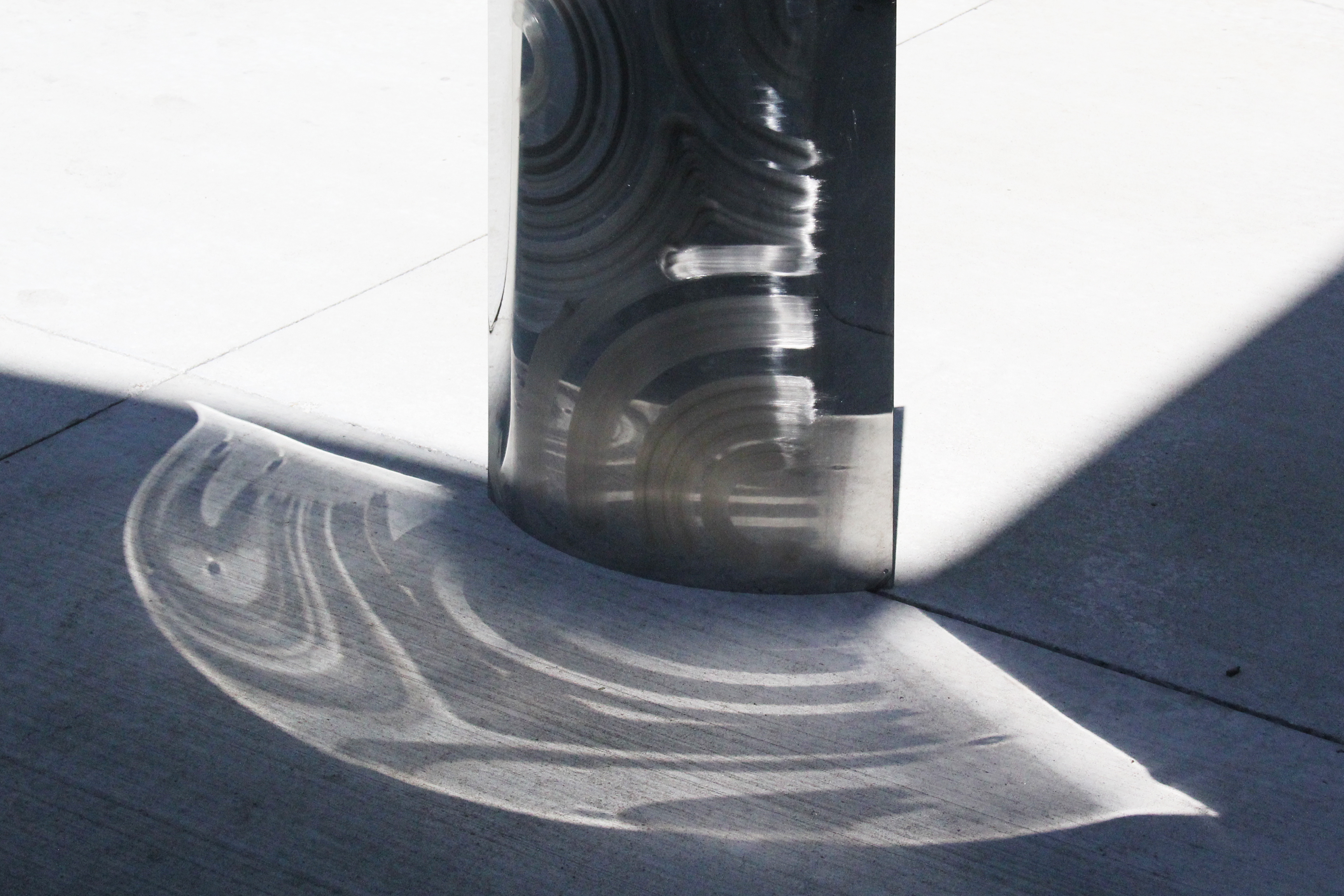 Reflected Patterns from Mirror Drawing
Reflected Patterns from Mirror Drawing